


















printing in mid air
an Experimental Approach to 3D Printing
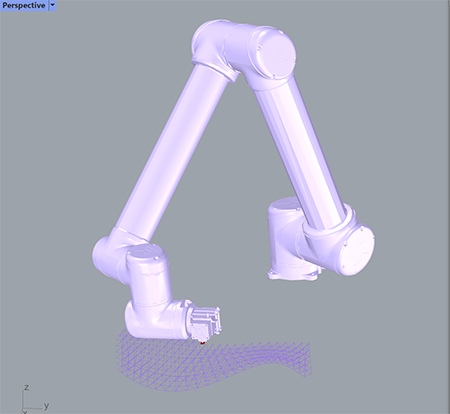
This semester I have been working on
experimental 3d printing and controlling collaborative robots.
with „Printing in mid air, an experimental approach to defaults
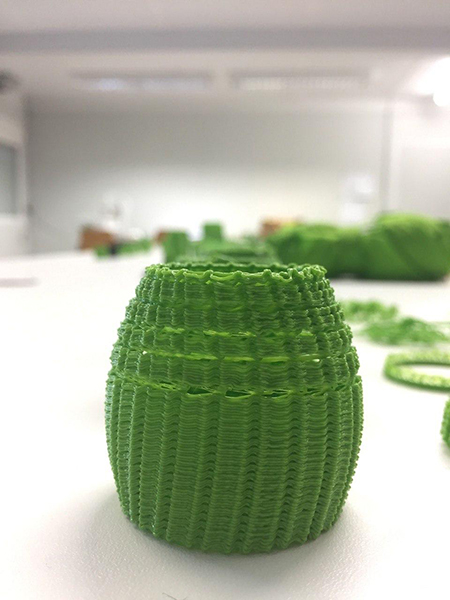
in 3d printing“ i dealt with a characteristic of 3d printing
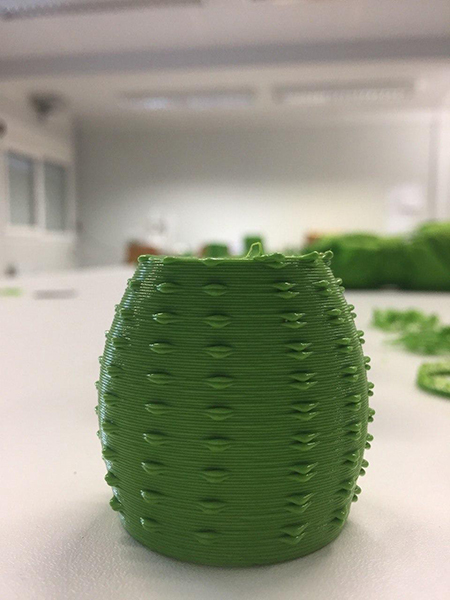
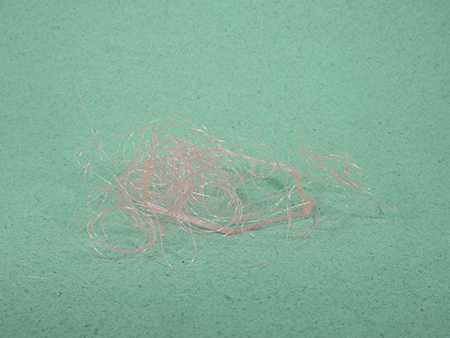
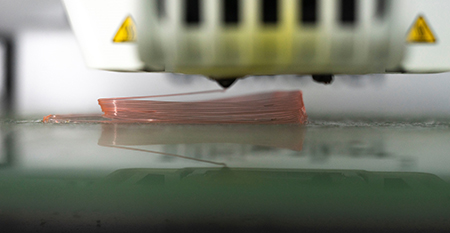
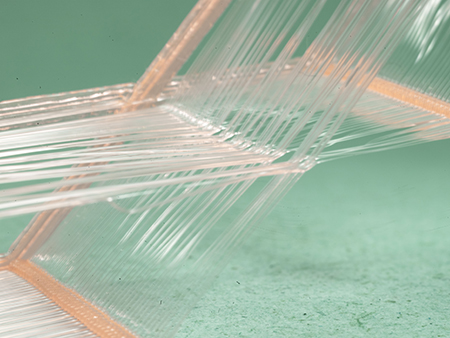
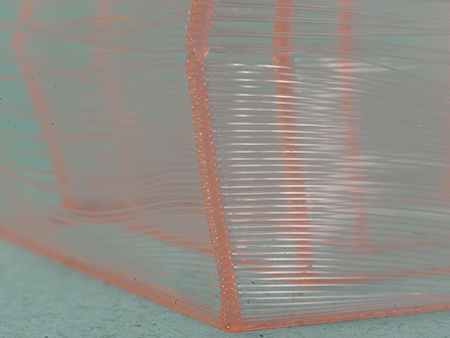
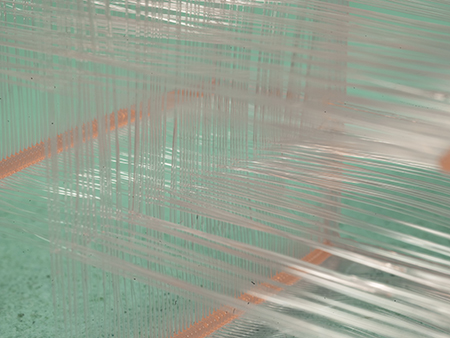
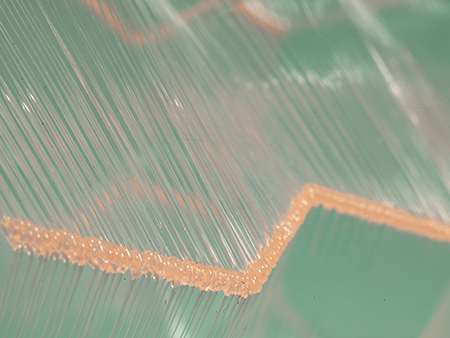
that would usually be considered as faulty. Stringing, also
known as oozing, happens when filament oozes out of the nozzle
while the extruder is moving from one location to another. even
though the extruder does not receive any command to convey the
filament while it is traveling along this path, the portion of
the filament that has already been melted tends to naturally
drip off the nozzle, leaving behind very thin strands of plastic.
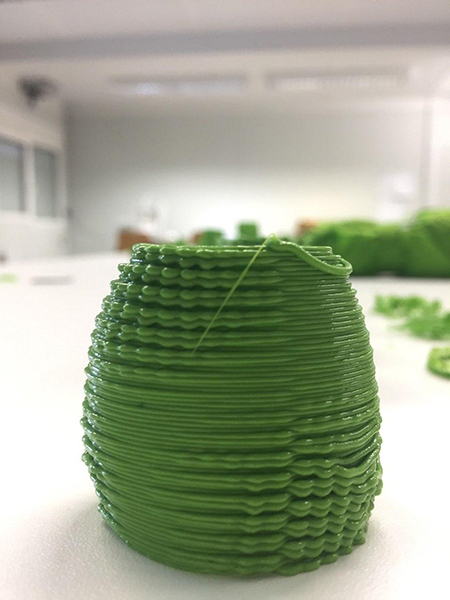
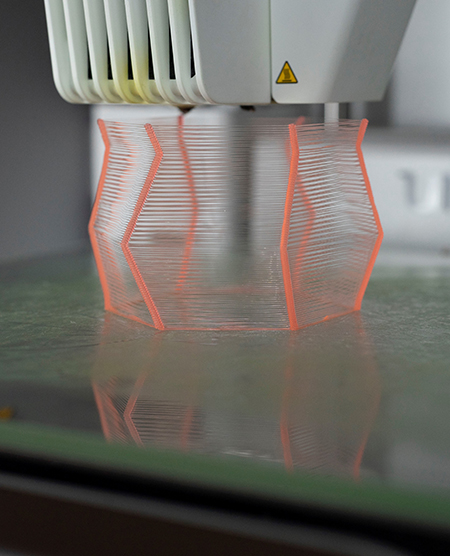
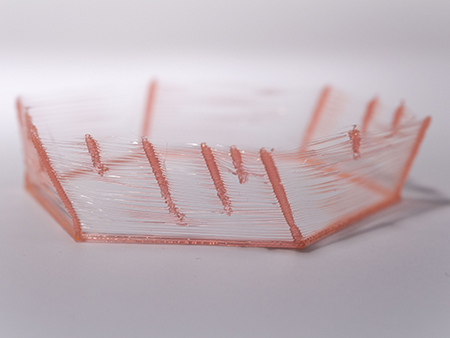
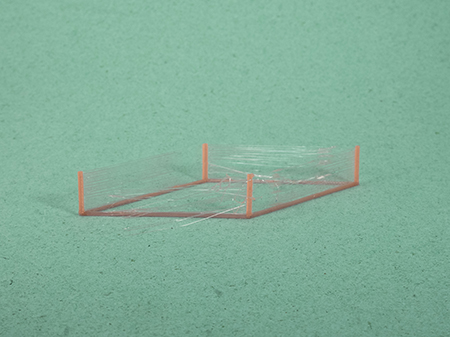
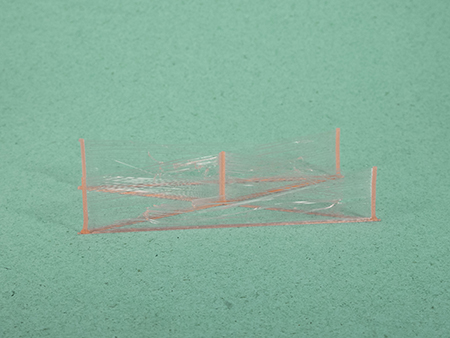
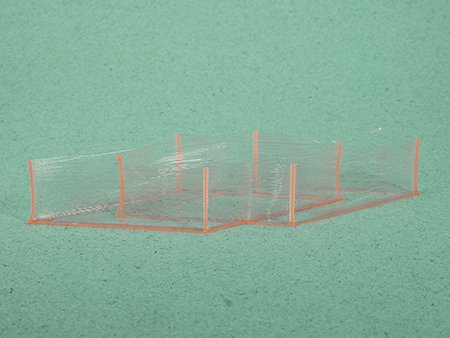
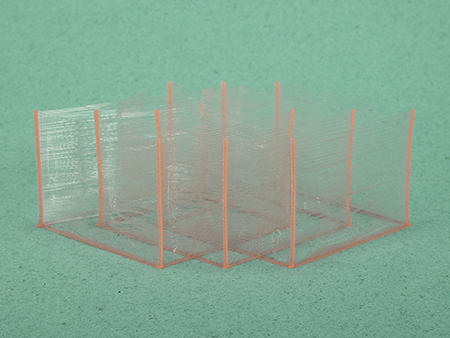
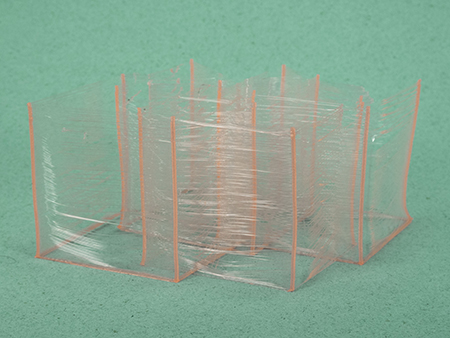
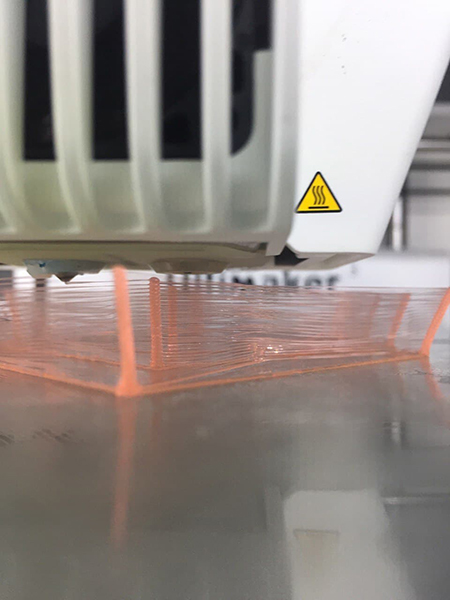
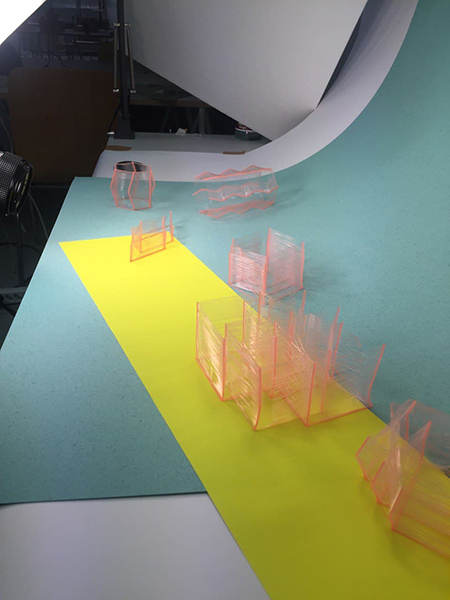
I wanted to intentionally control this phenomenon and use
it as a design and construction tool.
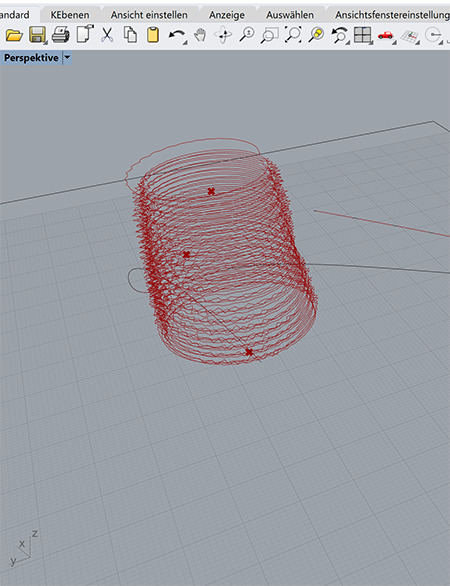
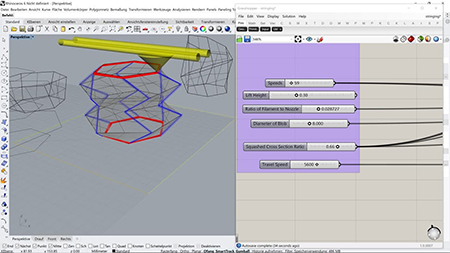
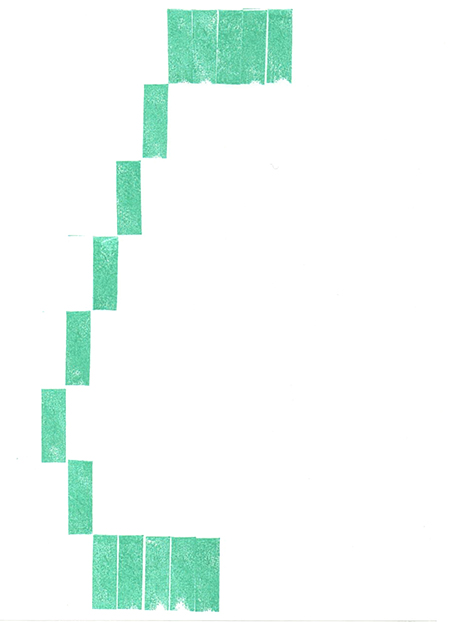
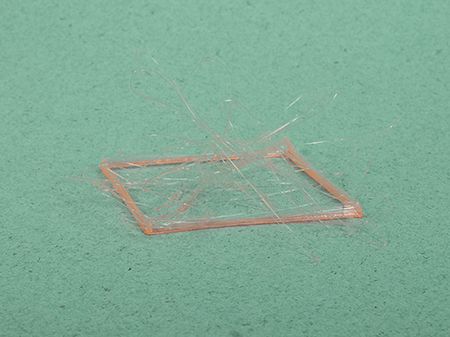
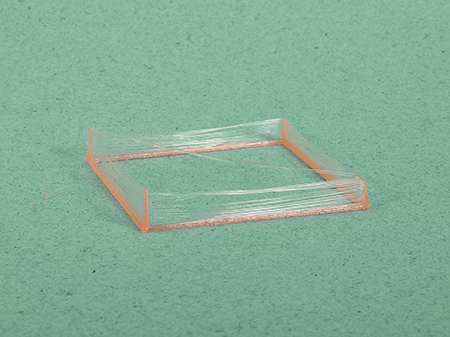
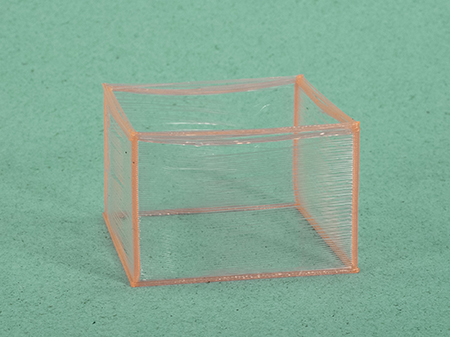
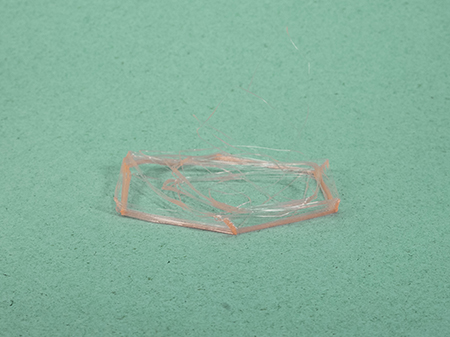
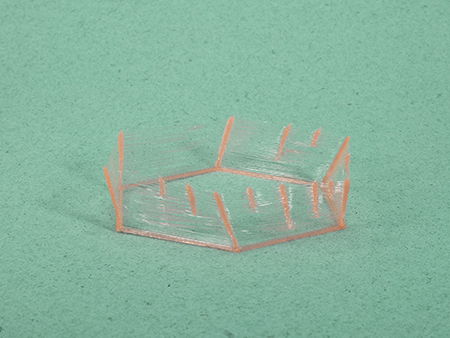
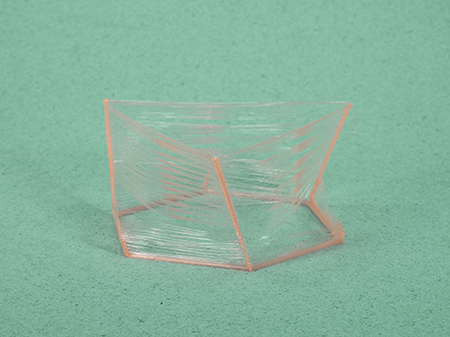
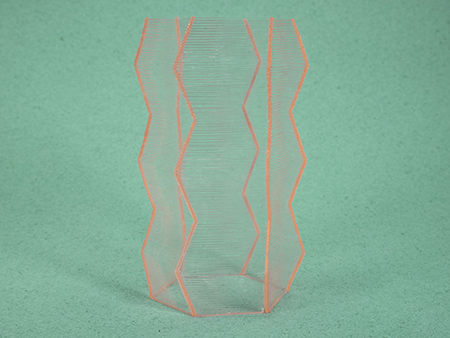
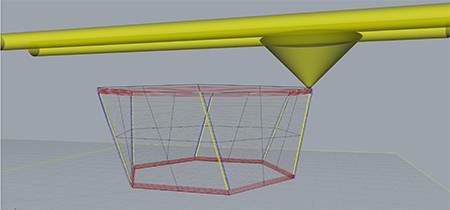
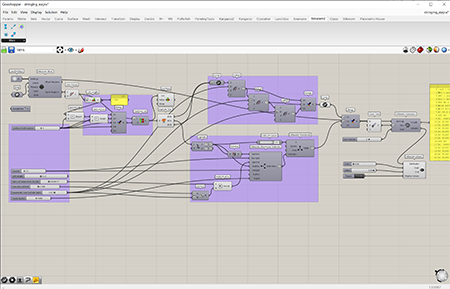
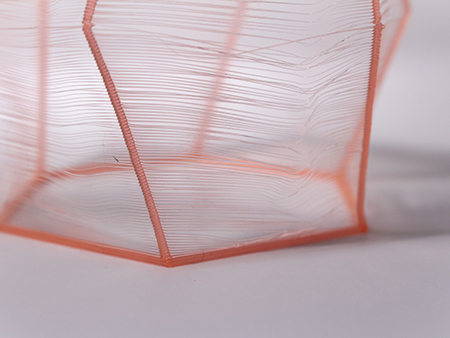
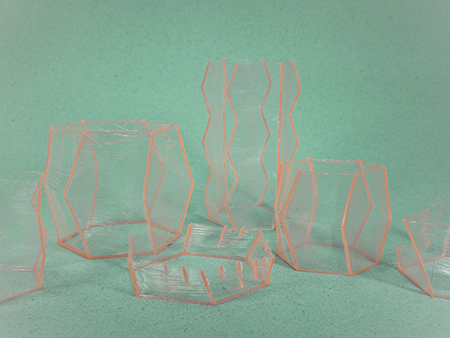
My goal was to print into air. With the help of Silkworm, I could control the extrusion of filament, temperature, printing speed and several other parameters separately from one another. I was able to control the path between two points in a way that a string was printed in the air between the two printing points. I eventually transferred this process to various grid geometries. this resulted in several studies on the properties of the printed objects which, even though the PLA filament didn’t have flexible characteristics, gained different material properties such as translucence, flexibility and a very low consumption of material through my printing process.
My goal was to print into air. With the help of Silkworm, I could control the extrusion of filament, temperature, printing speed and several other parameters separately from one another. I was able to control the path between two points in a way that a string was printed in the air between the two printing points. I eventually transferred this process to various grid geometries. this resulted in several studies on the properties of the printed objects which, even though the PLA filament didn’t have flexible characteristics, gained different material properties such as translucence, flexibility and a very low consumption of material through my printing process.
Wayra Aguilar
Binary Matter 2.0
WS 2020/21
Prof. Christian Zöllner
MA Amelie Goldfuß
Tom Witschel
Burg Giebichenstein
University of Art and Design Halle
Binary Matter 2.0
WS 2020/21
Prof. Christian Zöllner
MA Amelie Goldfuß
Tom Witschel
Burg Giebichenstein
University of Art and Design Halle